
La localisation par satellite GNSS est présente dans la vie quotidienne de tous les jours. Avec une grande variété de domaines d’application, son fonctionnement est souvent peu connu. Comment ça marche ? De la théorie à la pratique, les principes fondamentaux du positionnement GNSS
Nous devons le Global Positioning System ( GPS ) à l’armée américaine. À partir de 1973, elle a créé la première technologie de positionnement par satellite. A l’origine réservé à un usage strictement militaire, le GPS sera ouvert librement en l’an 2000 aux applications civiles. Au fil des ans, il a pris une place incontournable dans la société.
Et bien que le langage courant utilise souvent le seul terme « GPS » pour évoquer cette technologie, il est plus juste aujourd’hui de parler du Système mondial de navigation par satellite ( GNSS ). En effet, d’autres constellations et systèmes de positionnement ont rejoint le GPS américain.
Aujourd’hui, nous avons des milliers de satellites autour de la Terre. Parmi eux, on peut citer les satellites des constellations GPS américaines, GLONASS russe, GALILEO Européen, BEIDOU Chinois… Tous ne sont pas encore opérationnels à 100 %. C’est le cas pour GALILEO et BEIDOU, qui devraient être en 2020.
Le principe de fonctionnement est basé sur l’intersection des signaux électromagnétiques émis par les satellites. L’utilisateur détecte les signaux satellites définissant des segments d’utilisateur de satellites dont l’intersection géométrique permet la localisation.
Afin d’être en permanence fonctionnelles partout et à tout moment, les solutions actuelles utilisent des signaux provenant de plusieurs constellations. Ce chevauchement d’informations permet une meilleure précision, des temps de convergence quasi instantanés et une disponibilité 24/7 partout dans le monde.
La précision des récepteurs est au mieux métrique. Divers calculs et stratégies sont utilisés pour améliorer cette précision. TERIA est l’un des outils pour augmenter la précision. Il permet à l’utilisateur d’obtenir une précision centimétrique et en temps réel.
L’ arrivée de nouvelles solutions centimétriques nous permet de s’attaquer à de nouveaux domaines d’application : guidage autonome des véhicules, utilisations marines, drones, etc.

Les constellations opérationnelles nominales GPS, GALILEO, GLONASS, BEIDOU… se composent de plusieurs dizaines de satellites opérant à une altitude de près de 20 000 km le long d’orbites réparties uniformément pour couvrir tous les continents .
Grâce à cette couverture, l’utilisateur est en mesure de voir simultanément entre cinq et trente cinq satellites en fonction de sa position sur Terre.
Chaque constellation est surveillée et contrôlée par des postes de contrôle qui mettent à jour les informations (positions, éphémérides et correction des horloges) de tous les satellites. Ils répandent ensuite leurs paramètres à la Terre par des ondes électromagnétiques transportant des signaux codés.
Les satellites GPS, GALILEO, GLONASS, BEIDOU… ont deshorloges atomiques qui fournissent unedatation extrêmement précise . Les informations temporelles sont placées dans les codes diffusés par satellite. Le récepteur détermine ensuite en permanence l’heure à laquelle le signal a été diffusé. Le signal contient également des données orbitographiques afin que le récepteur puisse calculer l’emplacement des satellites. C’est ce que l’on appelle les informations de navigation.
Le récepteur GNSS (téléphone, topographie, agriculture, automobile/système de guidage aéronautique…) utilise la différence de temps entre la réception et le temps de diffusion du signal pour déterminer la distance entre le récepteur et le satellite. Le récepteur multiplie le temps de trajet par la vitesse de la lumière afin de calculer la distance récepteur/satellite.
Ainsi, un GNSS mobile qui capte des signaux provenant d’au moins quatre satellites peut localiser avec précision en trois dimensions tout point placé dans la visibilité des satellites. Pour cela, il utilisera l’intersection de ces vecteurs satellite-récepteur.
Toutefois, même en l’absence d’obstacles, des facteurs perturbateurs importants nécessitent une correction des résultats du calcul. Le premier est le croisement des couches inférieures de l’atmosphère, la troposphère. La présence d’humidité et les changements de pression de la troposphère changent l’indice de réfraction et donc la vitesse et la direction de propagation du signal satellite.
Le deuxième facteur de perturbation est l’ionosphère. Cette couche ionisée par le rayonnement solaire change la vitesse du signal propagation. La plupart des récepteurs intègrent un algorithme de correction.
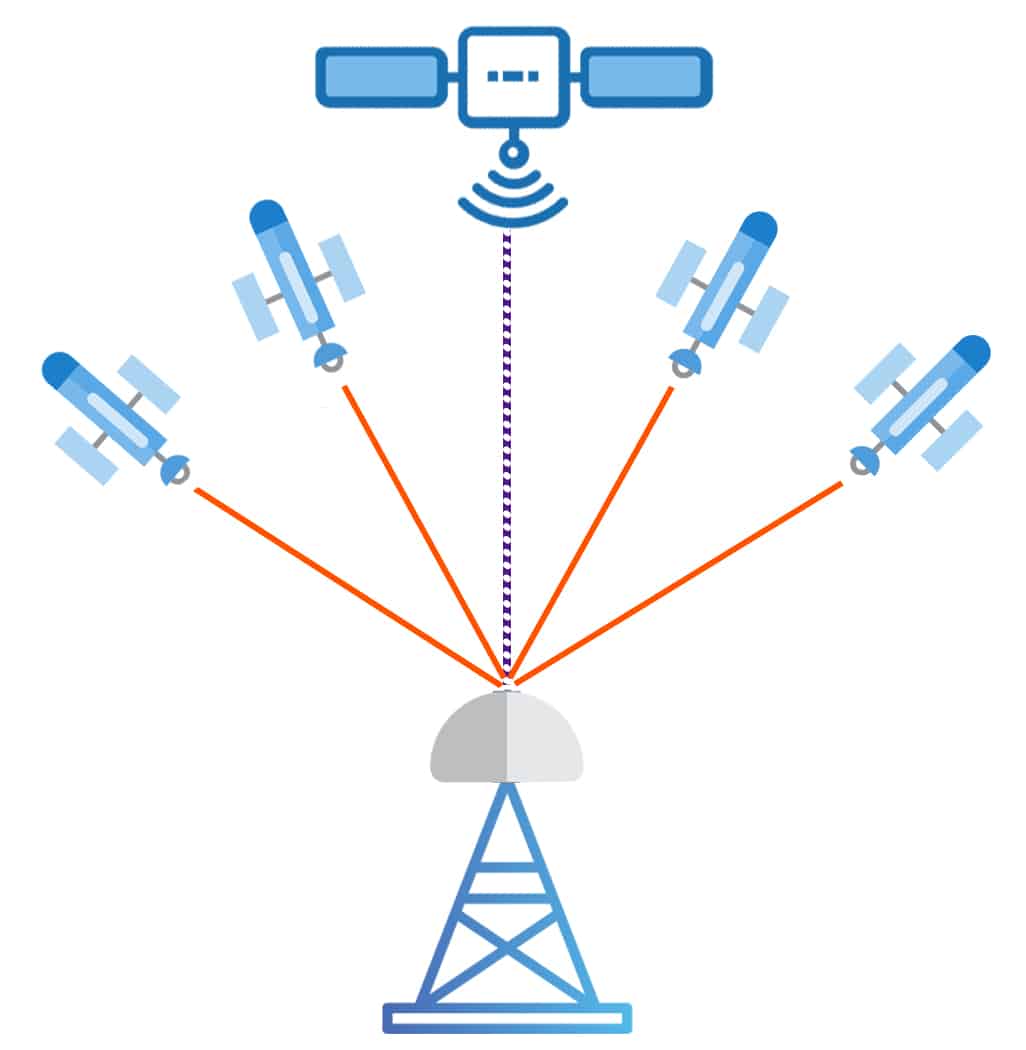
La troisième et dernière étape consiste à déterminer une position précise. Le récepteur sera en mesure d’effectuer une trilatération de la position à partir des données de distance collectées entre le récepteur et plusieurs satellites.
Un récepteur GNSS a besoin d’au moins 4 satellites pour pouvoir calculer sa propre position. Trois satellites détermineront la latitude, la longitude et la hauteur. Alors que le quatrième permet de synchroniser l’horloge interne du récepteur.
Pour populariser la démonstration, nous nous plaçons sur un plan 2D. Le principe sera identique pour passer à l’espace 3D. Seuls les cercles seront remplacés par des sphères.
Supposons que le récepteur soit à 25 000 km d’un premier satellite donné. Cela signifie que le récepteur peut être situé n’importe où sur les 25 000 km cercle de diamètre, avec le satellite comme centre.
La boîte recevra également un signal d’un second satellite à 20 000 km par exemple. Il conclura qu’il est également sur ce cercle. Sa position exacte sera à l’intersection des deux cercles, c’est-à-dire deux possibilités.
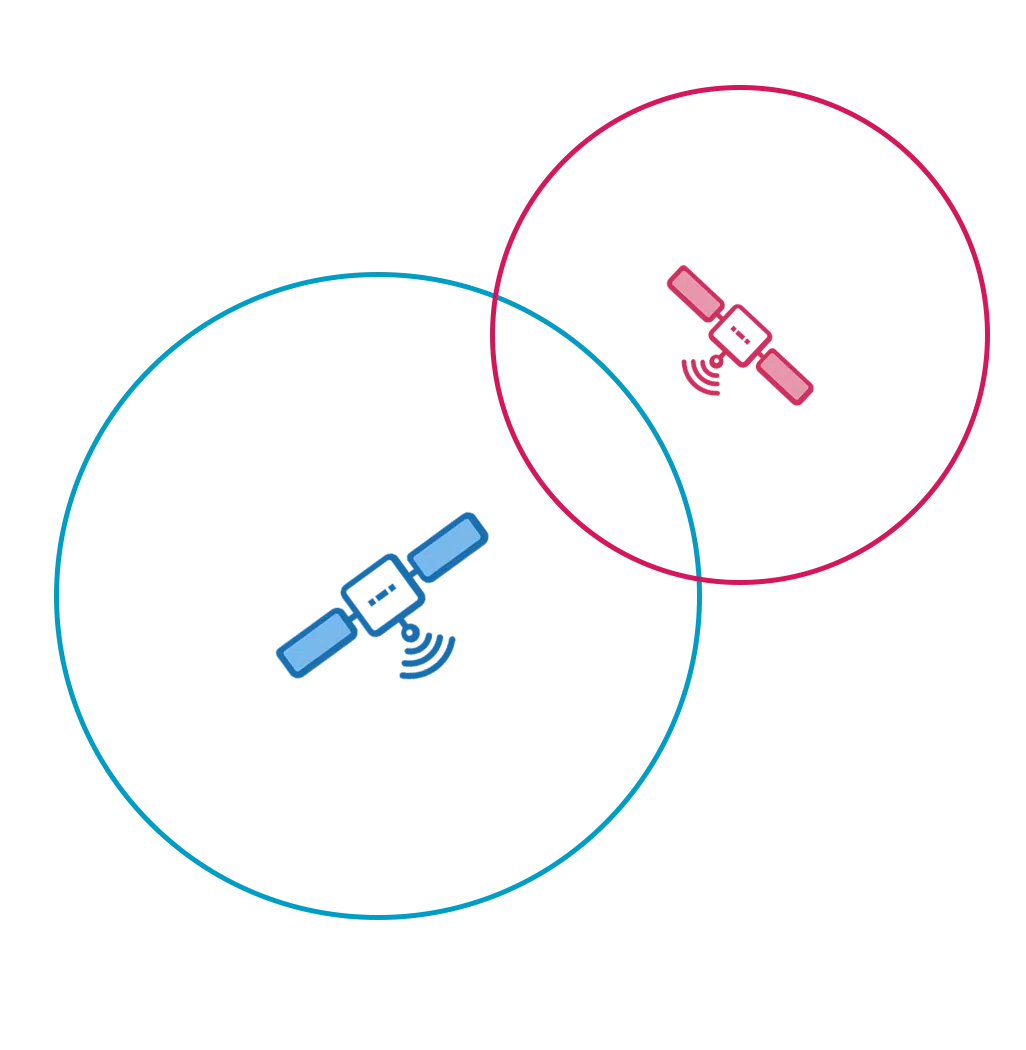
Afin de déterminer laquelle de ces possibilités est correcte, le signal d’un troisième satellite est nécessaire. Pour la démonstration, nous l’imaginerons avec un diamètre de 15.000km.
À l’intersection de ces trois cercles, il ne reste qu’un seul point possible dans un plan 2D. On vient de géolocalisation de notre récepteur.
Balayez pour passer de 2D à 3D
Pour passer à la 3D, un 4ème satellite serait donc nécessaire, car l’intersection de 3 sphères donne 2 points. Cependant, nous pouvons nous en passer parce qu’un seul des deux points est géométriquement cohérent. Et donc il y aurait encore une possibilité d’éliminer.
Cependant, l’utilisation d’un 4ème satellite est nécessaire , car il fournit des solutions dans la mesure du temps de propagation du signal. Les récepteurs GNSS au sol n’ont que des horloges sommaires qui n’ont pas la précision des horloges atomiques satellitaires. Le résultat est une désynchronisation qui doit être résolue afin de contrôler la distance récepteur-satellite et d’obtenir ensuite une géolocalisation correcte.
Suivez-nous aussi sur les réseaux sociaux et via notre Newsletter !




L’ exemple fait référence à l’utilisation de quatre satellites, mais les récepteurs GNSS sont capables de suivre de nombreux satellites à la fois (stations, topographie, téléphone, dispositif de navigation…). Cela améliore la précision, le temps de convergence, la couverture et réduit les risques d’erreurs.
En moyenne, un récepteur peut capturer 7satellitesde la même constellation (14 satellites sur GPS — GALILEO). Pour le positionnement centimétrique, au moins 5 satellites sont indispensables.
Actuellement 129 satellites de positionnement par satellite sont actifs et disponibles pour des applications civiles :
Pour les applications dont la précision centimétrique est essentielle (véhicule autonome, bathymétrie, topographie…), cela ne suffit pas. En effet, les distorsions dans la propagation des signaux, peuvent conduire à des erreurs de plusieurs mètres. C’ est le cas en particulier dans le croisement des couches atmosphériques.
Certaines solutions telles que TERIA peuvent corriger ces erreurs de mesure et fournir un positionnement centimétrique de 1-2cm en temps réel .
Ils reposent sur des réseaux récepteurs tous connectés aux centres informatiques, qui modélisent toutes les erreurs et corrections de retour (PPP, PPP-RTK, NRTK et RTK) en temps réel aux utilisateurs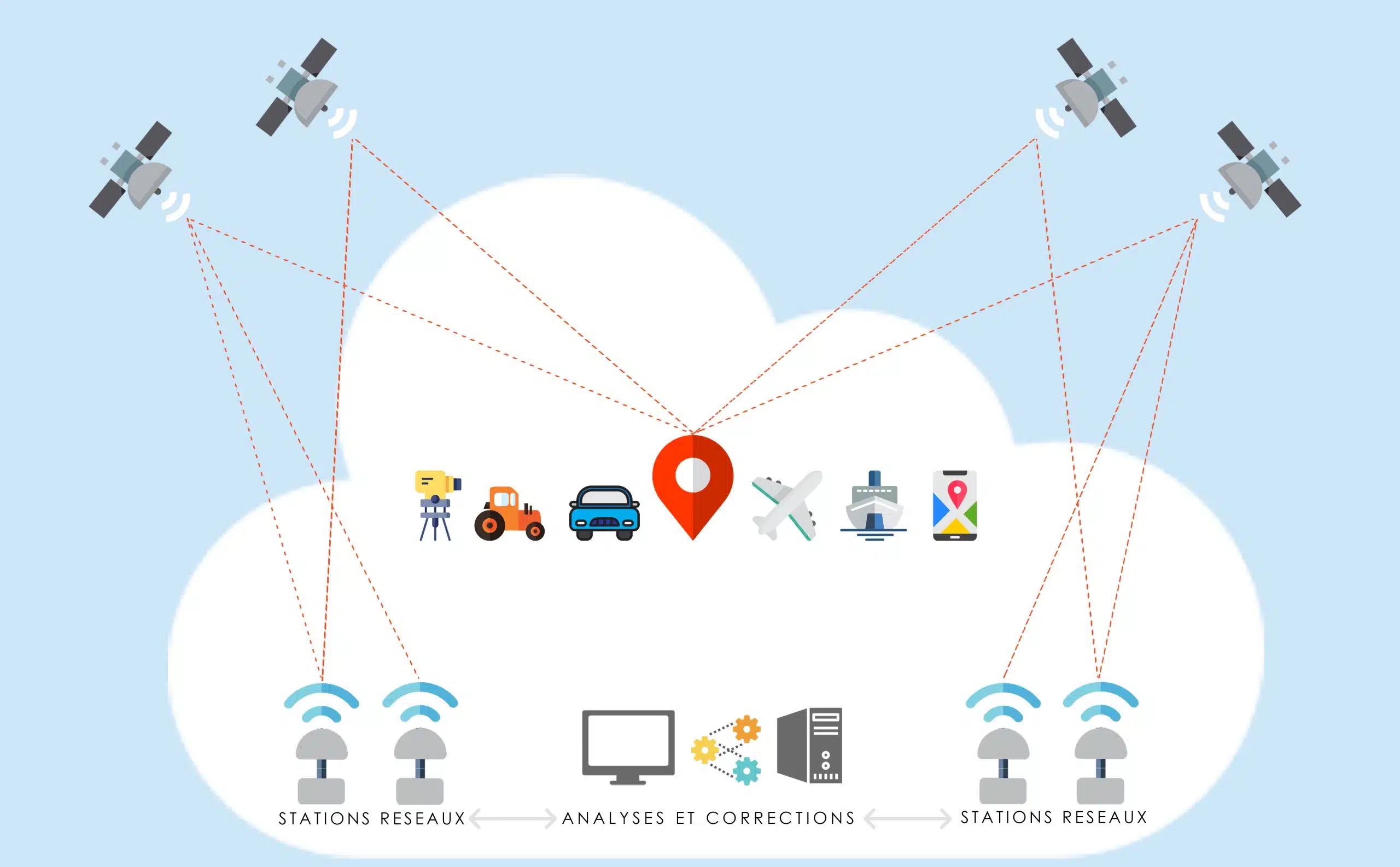
Afin de localiser mathématiquement un objet sur Terre de manière sans équivoque, il est nécessaire de définir un dépôt géodésique qui est exprimé par des coordonnées géographiques qui sont le plus souvent : latitude, longitude et altitude (ou altitude) par rapport à la mer moyenne niveau (élévation orthométrique) ou par rapport à une surface de référence, généralement ellipsoïde (élévation ellipsoïdale).
Historiquement, les systèmes géodésiques étaient déterminés à partir de mesures angulaires et de mesures de longueur. Un système géodésique était associé à un réseau géodésique, un ensemble de points dont les coordonnées avaient été déterminées à partir de mesures terrestres.
La technologie spatiale a permis de définir des systèmes géodésiques mondiaux. Le système géodésique le plus utilisé dans le monde est le Système géodésique mondial 1984 ( WGS84 ), associé avec le système de positionnement GPS américain.
Source : color-science.eu gnssplanning.com Vous voulez essayer TERIA pour votre entreprise ?
Tag : mettre à jour un GPS